AI Humanizes Domestic Robots, Enhancing Their Efficiency

Domestic robots can significantly simplify our daily lives. However, before entrusting them with household management, it is crucial to ensure their ability to adapt to specific conditions. Striving to augment this capability, researchers at the Massachusetts Institute of Technology (MIT) are hard at work.
Scientists from the MIT Computer Science and Artificial Intelligence Laboratory have utilized machine learning techniques to aid domestic robots in planning and executing tasks more efficiently. The team, led by Zhutian Yang, a Ph.D. student in robotics at MIT, has created the PIGINet system. It enhances the robots' problem-solving abilities, enabling them to tackle various challenges during task completion.
Manufacturers instruct domestic robots to conduct basic operations like opening the fridge, fetching certain items, or turning on the water. While these machines execute these tasks impeccably, it's crucial to note that these routines function perfectly solely in a test kitchen setting. Upon being relocated to a new home environment, the robot might face various obstacles. Overcoming these obstacles calls for additional training, inevitably demanding more time.
Because everyone’s home is different, robots should be adaptable problem-solvers instead of just recipe followers. Our key idea is to let a general-purpose task planner generate candidate task plans and use a deep learning model to select the promising ones. The result is a more efficient, adaptable, and practical household robot, one that can nimbly navigate even complex and dynamic environments. Moreover, the practical applications of PIGINet are not confined to households,says Zhutian Yang.
PIGINet is a unique type of neural network made up of plans, images, goals, and foundational facts. It evaluates all this information, deciding if a task's execution plan requires refining to develop possible navigational strategies.
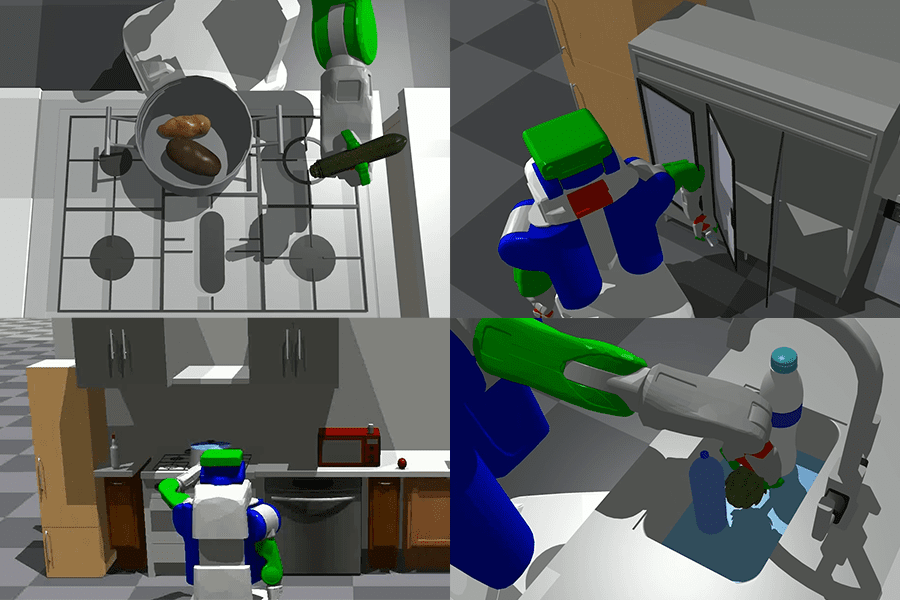
PIGINet assists domestic robots in navigating obstacles Source: Alex Shipps/CSAIL
Based on an encoder-transformer, PIGINet processes initial data and generates predictions concerning the result of a selected plan. In the training process, the system is provided with a foundation of 300-500 tasks, with hundreds of unique models of environments and tasks involved, including those that necessitate the shifting of object positions.
The result is that domestic robots equipped with PIGINet can carry out tasks with significantly greater efficiency. For simpler scenarios, the planning time was decreased by 80%, and for more complex ones, it was cut down by 20-50%. Importantly, PIGINet has enabled robots to understand the spatial arrangement and configuration of various objects, and it has enhanced their ability to interact effectively with previously unfamiliar items.
The integration of PIGINet into daily operations could prove advantageous not just in domestic settings, but across various sectors. This innovation could resolve the underlying dilemma robots face: whether to plan or to move. It makes these mechanical helpers faster and more productive. Researchers note that the creation of PIGINet is only the initial step in the promising field of developing methods to tackle tasks that are currently beyond robotic capabilities.
Our future aim is to further refine PIGINet to suggest alternate task plans after identifying infeasible actions, which will further speed up the generation of feasible task plans without the need of big datasets for training a general-purpose planner from scratch. We believe that this could revolutionize the way robots are trained during development and then applied to everyone’s homes,says Yang.