
Just eight years ago, Christopher Jaszczynski was driving a taxi. Today, he wakes up in a skyscraper overlooking the Persian Gulf. And chances are, you’re already following him on social media.



Dreaming of building your crypto business? Here’s how to start a crypto business in Dubai and launch legally with confidence.

Glass towers shimmer under the tropical sun, yachts idle in turquoise waters, and the hum of innovation fills the air—Singapore is where the crypto elite come to live, build, and belong.

Vienna has always been classy—but now it’s crypto-savvy too. Whether you’re spending Bitcoin on your morning coffee or mingling with Web3 insiders, crypto Vienna has you covered.

Living for cryptocurrency in Dubai has become a real experience by 2025. Discover how to use your digital assets for food, shopping, and daily essentials in this futuristic crypto city.

Now, you can rent in Dubai with crypto, signing rental agreements using BTC, altcoins, or USDT for both short-term vacations and long-term stays as an expat.

Imagine a city of hills, narrow cobblestone streets, and fado music drifting from cozy bars. This is Lisbon, the capital of Portugal, now rapidly transforming into a modern crypto city.

Youth. Wealth. Temptation. The quick climb through crypto scams rarely ends in peace. Instead, it leaves behind burnout, instability, and broken illusions.

Believe it or not, your morning habits might be the key to mastering your crypto strategy in today's unpredictable market.

Crypto trading demands speed and focus, and top traders understand that success often starts with an efficient crypto setup.

From Hyundai to LG, South Korea’s influence on global tech is undeniable. And Seoul? It’s the launchpad for Asia’s boldest crypto breakthroughs.

Crypto trading isn’t just about strategies—it’s about mindset. Let’s explore the mental biases that affect how traders make decisions (and lose money).

Crypto is often pitched as the key to financial freedom. But how feasible is living on crypto in the real-world American economy?


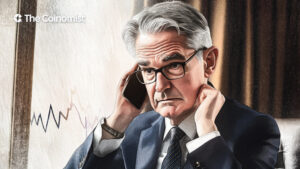
In his latest essay “The BBC,” Arthur Hayes examines the emotional pressures on the Federal Reserve and the monetary policy challenges that could lead to increased liquidity in the crypto market.

It takes just one post from Trump to stir the crypto market. Recently, he announced on Truth Social that the evaluation of a strategic crypto reserve is in progress as part of his broader Trump crypto policy.

There's been a lot of talk about possible changes to crypto tax policies in the U.S. One of the more controversial ideas floating around is “Trump no tax on crypto.” As Trump adopts a more crypto-friendly stance, major rumors have surfaced that he’s considering a 0% tax on crypto gains.

2025 isn’t exactly the most stable time for the economy: policy changes, trade tariffs, international tensions, and interest rate shifts are among the factors that make things more unpredictable. In times like these, people naturally start looking for alternatives, and one of the biggest ones has been crypto.


Crypto exchange Bitget has received the Digital Asset Service Provider (DASP) license from El Salvador, allowing the platform to expand its crypto offerings in the country.
OpenAI has announced free access to ChatGPT Plus for college and university students in the United States and Canada until May 2025.

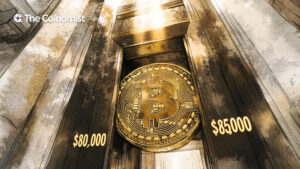
Bitcoin remains pinned under $85,000, as global markets digest rising tensions between the U.S. and China over fresh tariffs.


Explore the key differences between fiat money and commodity money. Learn about their intrinsic value, historical context, advantages, disadvantages, and real-world examples.


In recent years, blockchain technology has gained immense popularity, being the backbone of cryptocurrencies, decentralized finance (DeFi), and various other applications. However, as the technology continues to evolve, a crucial problem has surfaced: the blockchain trilemma.

A guide detailing the differences between cryptocurrency exchanges and wallets. Learn about their distinct roles, security features, liquidity, and user control in the digital asset ecosystem.
This is perhaps the most iconic crypto loss story of all time. In 2011, Stefan Thomas received 7,002 BTC for making a video. Today, that stash is worth $240 million. But he forgot the password. An entire fortune locked away forever.

Imagine you’ve built your own crypto exchange, and now it’s time to scale. You’ll need high-speed infrastructure, deep liquidity, and compliance.

Believe it or not, your morning habits might be the key to mastering your crypto strategy in today's unpredictable market.
Just eight years ago, Christopher Jaszczynski was driving a taxi. Today, he wakes up in a skyscraper overlooking the Persian Gulf. And chances are, you’re already following him on social media.

Shibetoshi Nakamoto didn’t wear hoodies or chase venture capital. He never claimed he was going to reinvent finance or save the world with blockchain. He just cracked a joke.

Cathie Wood (ARK Invest) has long been a polarizing figure on Wall Street. But who is she, really? Let’s take a closer look to see the full picture.


Kris Marszalek became a well-known figure in the crypto world after one of the most infamous Super Bowl ads in history.
In his latest essay “The BBC,” Arthur Hayes examines the emotional pressures on the Federal Reserve and the monetary policy challenges that could lead to increased liquidity in the crypto market.

It takes just one post from Trump to stir the crypto market. Recently, he announced on Truth Social that the evaluation of a strategic crypto reserve is in progress as part of his broader Trump crypto policy.
There's been a lot of talk about possible changes to crypto tax policies in the U.S. One of the more controversial ideas floating around is “Trump no tax on crypto.” As Trump adopts a more crypto-friendly stance, major rumors have surfaced that he’s considering a 0% tax on crypto gains.

Matvii Diadkov, founder of Bitmedia, shared with us in an exclusive interview his expert insights on Web3 adoption, impact of GameFi and community-centering tendencies in the market.

The first crypto craze took place almost a decade ago. Overnight, many people found out about Bitcoin and its underlying technology, blockchain.

Volodymyr Nosov, CEO of Europe’s largest crypto exchange WhiteBIT, sat down with Dmytro Gordon, one of Ukraine’s most prominent journalists. The interview touched on Bitcoin, crypto, WhiteBIT, cars, keys to success, and business vision.

Explore the key differences between fiat money and commodity money. Learn about their intrinsic value, historical context, advantages, disadvantages, and real-world examples.

Money20/20 Asia 2025, a leading fintech gathering in the region, returns this April with a focus on the future of finance, innovation, and human-centered tech.

Are sky-high Ethereum fees getting you down? The folks at Zora have come up with an alternative, introducing their Layer 2 solution with lower transaction fees. This article will walk you through how to get involved with the project and earn some rewards.
















